

4.4 Vakavuus ja ohjattavuus
Lentokoneen on oltava riittävän vakava, jottei ohjaajan tarvitse keskittyä koko ajan sen ohjaamiseen, mutta sen on toteltava kohtuullisilla ohjainvoimilla ohjaajan haluamia liikeratoja. Puuskan tai muun häiriön jälkeen koneen tulisi palata vakaaseen lentoon ilman sanottavia heilahteluja tasapainotilan ympärillä. Tällöin on koneen siis pyrittävä itsestään takaisin alkuperäiselle liikeradalleen, mutta kun tämä liikerata on saavutettu, ei heilahdus saisi jatkua kovin paljon ohi, vaan sen olisi vaimennuttava kohti alkuperäistä asemaa. Vakavuuskäsitteiden selventämiseksi esitetään seuraavassa havainnollisesti sekä staattisen että dynaamisen vakavuuden käsitteet.
 |
|
-
Staattinen vakavuus
Määritelmä: Lentokone on staattisesti vakaa, kun kaikkien koneeseen vaikuttavien ulkoisten voimien ja momenttien summa on nolla ja mikäli kone poikkeutettuna tasapainotilasta pyrkii palaamaan takaisin tasapainotilaan. Järjestelmä on sitä vakaampi mitä voimakkaampi pyrkimys tasapainotilaan on.
Dynaaminen vakavuus
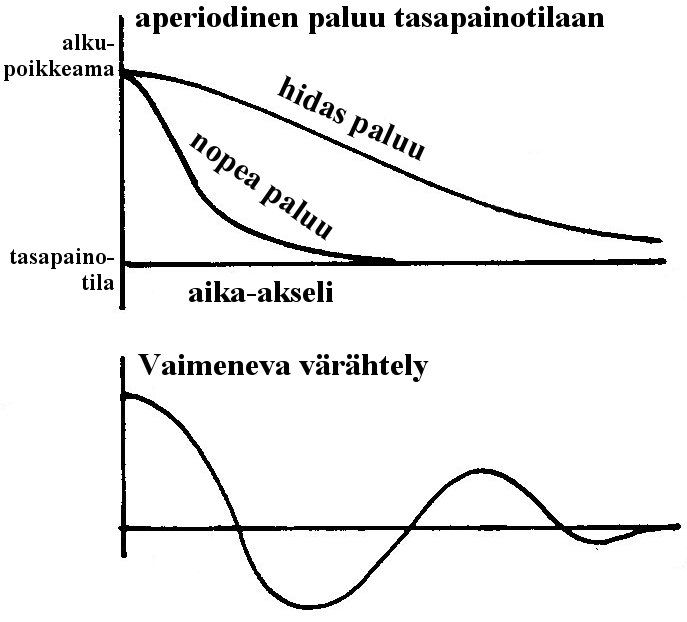
Jotta kone olisi dynaamisesti vakaa, on sen ehdottomasti oltava myös staattisesti vakaa. Staattisessa vakavuudessa puhuttiin siis pyrkimyksestä, mutta dynaamisessa vakavuudessa katsotaan, tuottaako pyrkimys myös tuloksen eli jääkö kone tasapainotilaan. Eli kone ei voi olla dynaamisesti vakaa, ellei se ole staattisesti vakaa. Häiriön jälkeinen paluu tasapainoasemaan saattaa tapahtua joko vähitellen tai vaimennettuna värähtelynä edellyttäen, että kone on staattisesti vakaa eli sillä on pyrkimys kohti tasapainoa. Tätä havainnollistavat seuraavat liikeradat:
 |
|
Vaimenevan värähtelyn vaimennus ilmaistaan puoliintumisaikana, mikä tarkoittaa heilahduksen laajuuden (amplitudin) vähenemistä puoleen alkuperäisestä. Dynaamisessa paluussa kohti tasapainoasemaa on tärkeä merkitys myös yhteen heilahdukseen kuluvalla ajalla. Mikäli heilahdusjakson kestoaika on sekunnin murto-osia, ei ohjaaja ehdi vaikuttamaan vastaliikkeillään heilahteluun. Jos jakson pituus sen sijaan on useita minuutteja, ei ohjaaja välttämättä edes huomaa tällaisen heilahteluliikkeen olemassaoloa. Vaarallisimmillaan on heilahduksen kestoaika silloin, kun se on lähes sama kuin ohjaajan reaktionopeus. Tällöin ohjaaja suorittama vastaliike on valmiiksi myöhässä ja vahvistaa heilahtelua ja vastaliikkeeksi tarkoitettu korjaus vain pahentaa tilannetta. Tätä saattaa esiintyä varsinkin korkeusohjauksessa. Jos kone on korkeuden suhteen yliherkkä, on paras keskittää hetkeksi ohjaimet eikä tehdä mitään vaan rauhassa seurata tilanteen kehitystä ja suorittaa ohjainliikkeet keskimääräisen ohjaussuunnan vaatimalla tavalla. Periaate on tuttu lennettäessä magneettisen kompassin mukaan, jolloin kompassiruusu heiluu keskiarvon molemmin puolin ja on vain maltettava odottaa kompassiruusun heilahdusjakson ajan ennen kuin voi sanoa, mikä on todellinen lentosuunta. Joissakin koneissa esiintyy varsinkin lentoonlähtö- ja laskutilanteissa tällaista heilahtelutaipumusta. Jos sivullisena seuraa konetta, joka tekee pomppulaskun, voi välittömästi havaita ohjaajan mahdollisen virhereaktion, sillä pompun vaimennuksessa on helppo tehdä korjaus väärässä paikassa ja tuloksena on vielä pahempi pomppu. Liian takana oleva painopiste aiheuttaa helposti epävakautta.
Suunta- ja kallistusvakavuus
Suuntavakavuuden tärkeimmät tekijät ovat sivuvakaaja ja sivuperäsin. Kallistusvakavuuteen vaikuttaa voimakkaimmin tehollinen V-kulma.
Talojen katoilla olevat tuuliviirit ovat hyviä esimerkkejä erittäin suuntavakaista laitteista. Nehän kääntyvät hyvin nopeasti vallitsevan tuulen suuntaiseksi. Jos viirin poikkeuttaa sivuun, se palaa heti takaisin osoittamaan tuulen suuntaa. Lentokoneen tulisi myös palata mahdollisen häiriön jälkeen lentotilaan, Jossa ilmavirta puhaltaa suoraan edestä. Häiriöinä tulevat kysymykseen sivulta tulevat puuskat, äkillinen sivuperäsimen asennon muutos, siivekkeen käyttö jne. Häiriöille on ominaista se, että ilmavirtaus siirtyy sivuttaiseksi. Suuntavakavan koneen tulee palata takaisin puhtaaseen lentoon. Suuntavakavuudella on merkitystä oikean lentosuunnan säilyttämisen, sekä sivuluisun ja virheliikkeiden oikaisemisen kannalta. On hyvin tavallista, että koneen nokka heilahtelee puuskaisella säällä edestakaisin lentosuunnan molemmin puolin. Tätä heilahtelua voidaan hieman vaimentaa, mikäli sivuperäsin pidetään täysin paikallaan. Koska heilahtelun jaksoluku on kuitenkin verrattain suuri, ei ohjaaja ehdi kumota heilahtelua vastaliikkeillään. Erikoisen voimakkaana tällainen heilahtelu esiintyy lyhytrunkoisilla kaksimoottorikoneilla. Edellä kuvatun nopean heilahteluliikkeen lisäksi on olemassa myös erittäin hidas heilahtelu, jonka jakso kestää useita minuutteja. Tämä liike on usein epävakaa ja yhdistyy koneen kallistumisen kanssa spiraaliliikkeeksi, josta tulee enemmän puhetta kallistusvakavuuden jälkeen. Vakavuusakselit
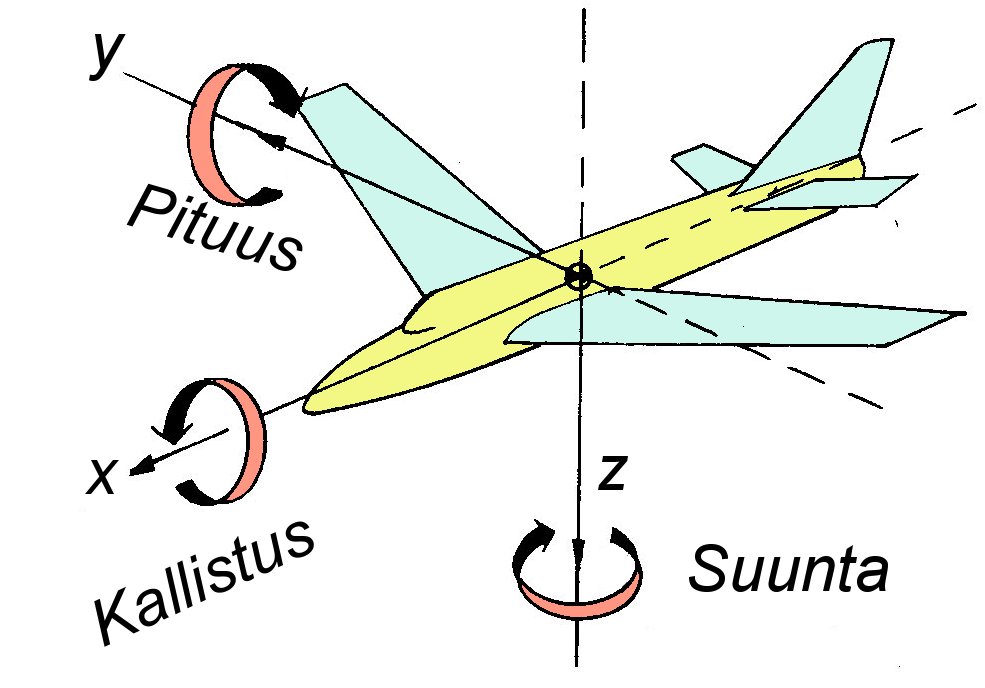
Lentokone voi heilahdella hyvin moneen eri suuntaan. Koska esitys on helpompaa, mikäli tutkitaan kutakin osatekijää erikseen, on tullut tavaksi jakaa lentokoneen liike eri komponentteihin. Suuntia, joihin liike jaetaan, kutsutaan vakavuusakseleiksi. Kuvassa no. 75 on esitetty koneen vakavuusakselit merkinnöin, jotka ovat yleisesti käytössä kirjallisuudessa. Positiivinen liike tapahtuu akselin positiiviseen suuntaan ja negatiivinen päin vastoin. Kallistus on esimerkiksi positiivinen oikealle. Vakavuusakselien origo on koneen massakeskipisteessä, jonka ympäri kone kääntyy. Akselisuunnat yhtyvät koneen akselisuuntiin liikkuen siis koneen mukana. Ilmavirta kohtaa akseliston suorassa lennossa yleensä melko lähellä x-akselin suuntaa, mutta ei välttämättä yhdy siihen. Virheliikkeissä ilmavirran suunta voi olla hyvinkin paljon sivusta.
Vakavuusakselit
 |
|
